Ученые разработали аппарат, способный различать определенные овощи на поле.
Группа британских инженеров сконструировала робота, который различает созревшие кочаны латука и аккуратно их срезает. Об этом сообщило Journal of Field Robotics.
Согласно результатам полевых испытаний, устройство показало эффективность около 85%. Именно такую долю созревших овощей оно распознавало.
Сейчас сельское хозяйство всей планеты достигает три-четыре процента мирового ВВП. Компании заняты разработкой и испытаниями автоматизированных систем для сбора урожая и иных действий в рамках отрасли.
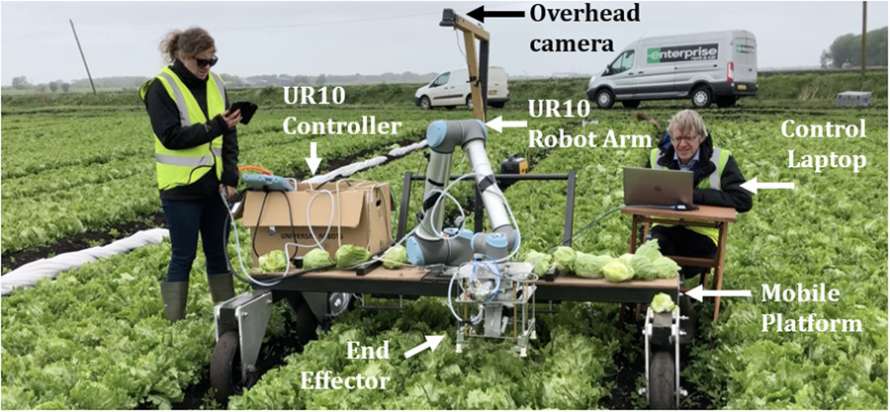
Коллектив инженеров возглавила Фумия Иида. Они создали манипулятор на колесной платформе. Его ширина сопоставима с шириной одной грядки. Конец «руки» увенчан захватом, ножом и камерой. Второй объектив установлен наверху платформы.
Специалисты предполагали разработать лишь тестовый вариант потенциально массово распространяемого робота. По этой причине некоторые элементы они решили упростить. К примеру, аппарат находится на пассивной платформе, которую вынужден перемещать вручную оператор.

Робот способен распознавать кочаны с помощью локализации, основанной на сверточной нейросети YOLO v3. Технология сверточной нейросети Darknet Object Classification Network классифицирует овощи по четырем типам – созревший, несозревший, зараженный, а последний предназначен для распознавания земли.
Для обучения первой сети использованы полторы тысячи фотографий, а второй – 665.
источник
Группа британских инженеров сконструировала робота, который различает созревшие кочаны латука и аккуратно их срезает. Об этом сообщило Journal of Field Robotics.
Согласно результатам полевых испытаний, устройство показало эффективность около 85%. Именно такую долю созревших овощей оно распознавало.
Сейчас сельское хозяйство всей планеты достигает три-четыре процента мирового ВВП. Компании заняты разработкой и испытаниями автоматизированных систем для сбора урожая и иных действий в рамках отрасли.
Коллектив инженеров возглавила Фумия Иида. Они создали манипулятор на колесной платформе. Его ширина сопоставима с шириной одной грядки. Конец «руки» увенчан захватом, ножом и камерой. Второй объектив установлен наверху платформы.
Специалисты предполагали разработать лишь тестовый вариант потенциально массово распространяемого робота. По этой причине некоторые элементы они решили упростить. К примеру, аппарат находится на пассивной платформе, которую вынужден перемещать вручную оператор.
Робот способен распознавать кочаны с помощью локализации, основанной на сверточной нейросети YOLO v3. Технология сверточной нейросети Darknet Object Classification Network классифицирует овощи по четырем типам – созревший, несозревший, зараженный, а последний предназначен для распознавания земли.
Для обучения первой сети использованы полторы тысячи фотографий, а второй – 665.
источник